
Orthop Surg:使用混合现实手术导航和解锁闭合复位技术框架辅助骨盆骨折复位和固定的新技术
2023-10-01 医路坦克 MedSci原创 发表于陕西省

磁共振核磁共振成像技术在不延长手术时间的情况下提高了复位精度和辐射暴露。
骨盆环断裂(PRD)是一种严重的骨盆创伤,死亡率高,从4.1%到9.1%不等,致残率从23.0%到37.5%不等。术后并发症的发生率高达25%,这些并发症大多与手术暴露有关。

目前,闭合复位与通道螺钉(CS)固定可达到85%的优异或良好复位,被认为是开放手术的良好选择。该策略还具有减少出血量和降低感染率等优点。然而,由于在手术过程中频繁使用术中透视(平均>150次),该技术可能会使外科医生和患者过度暴露于辐射中。例如,Gras等人报道髂骶关节螺钉或耻骨支螺钉的置入需要123 ±12秒透视。此外,Routt等人报道盆腔骨折闭合复位固定每次手术平均透视时间为3:48 min。一些计算机辅助导航系统已经开发出来,以提高CS放置的安全性和准确性,同时也减少了辐射暴露。然而,很少有报道描述使用手术导航辅助骨折复位。
精确复位是最佳螺钉放置的先决条件。然而,由于骨盆解剖结构的复杂性,不能直接监测闭合复位过程。因此,闭合还原过程的成功依赖于一定程度的运气。一些复位工具和技术,包括Matta,Starr,和解锁闭合复位技术(UCRT)20帧,已经开发出来,允许进行手术导航辅助闭合复位。最近,一项使用混合现实手术导航(MRSN)和UCRT框架的新技术已经开发出来,可以实时监测骨折碎片位移,指导骨盆骨折复位。这项新技术还可以帮助确定复位良好后骨盆环固定的CS轨迹。本文旨在评估(i)准确性,(ii)辐射暴露,以及(iii) MRSN与UCRT框架一起用于骨盆闭合复位和固定的可行性。
方法:30例PRD患者入组研究。所有患者术前都进行了CT扫描,骨盆和跟踪器被分割成三维模型。在MRSN引导下,置入辅助复位螺钉抓住骨盆骨。计划理想的闭合复位轨迹,在复位良好后使用合适的CS螺钉稳定固定。分析手术时间、透视次数、Matta评分和Majeed评分。
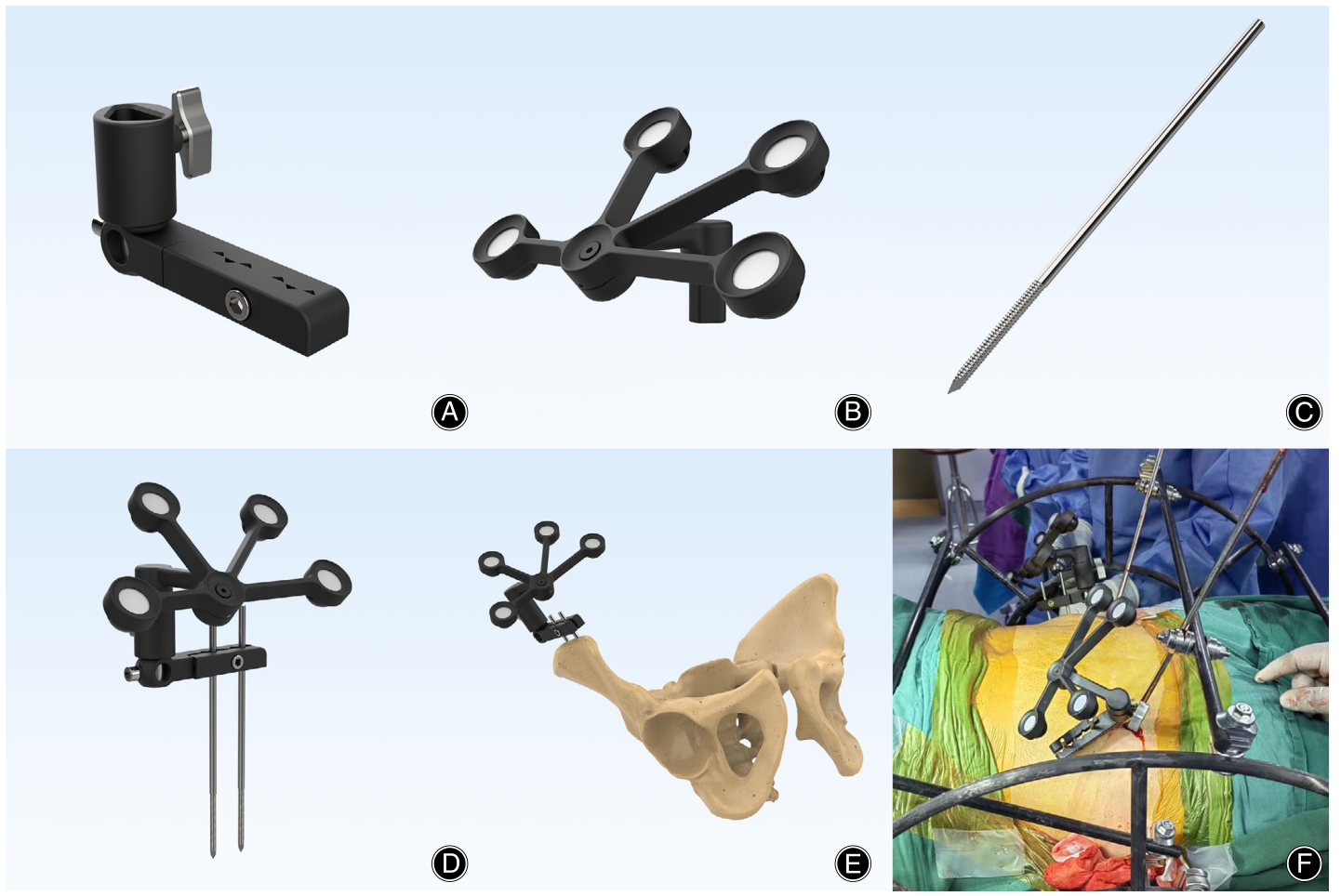
图1:参考架(A)、红外反射跟踪器(B)和专用固定螺钉(C)的设计。连接参考架和红外反射跟踪器的专用固定螺钉在原理图(D, E)和临床设置(F)中牢固地固定在骨盆髂骨上。

图2:手术导航下OTA-61 C1.2 Tile复位策略。(A)使用MIMICS软件使用红外反射跟踪器对骨盆进行分割。(B)右侧骨盆复位目标位置(#8)在骶骨垂直中线平面上镜像左侧髂骨。(C)右镜像髂骨(#8)平移或旋转至骨折的右髂骨位置(5)。(D-F)复位策略简化为通过控制长螺钉,抓住骨盆骨,并将髁上牵引至股骨远端,平移或旋转髂骨#5。1. 绿色跟踪器代表右侧髂骨。2. 紫色跟踪器代表左髂骨,镜像的左髂骨是右髂骨的复位目标位置。3.左髂骨。4. 骶骨。5。正确的髂骨。6. 右侧耻骨和坐骨支骨折。7. 右侧后髂骨骨折。8. 从左髂骨镜像右髂骨。9. 前上髂骨棘。10. 耻骨联合。11. 后上髂骨棘。
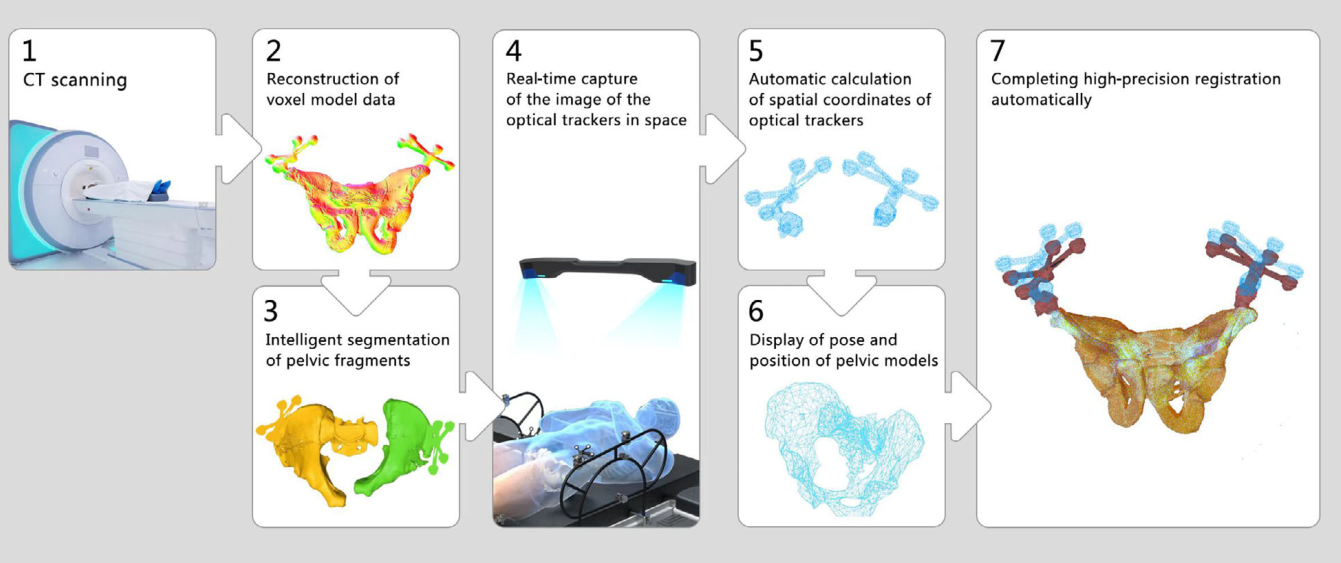
图3 体素配准方法流程图

图4 放置髋臼上螺钉。(A) Noitom导航系统的术中视图。(B)虚拟前后视图。(C)前后透视。(D)虚拟侧面视图。1. 带跟踪器的钻套。2. 虚拟钻套。3.透视时钻套和螺钉。

图5 右LC-2螺钉放置。(A) Noitom导航系统的术中视图。(B)虚拟髂斜位视图。(C)髂斜位透视。(D)虚拟髂骶关节入口视图。(E)髂骶关节入口透视。1. 带跟踪器的钻套。2. 虚拟钻套。3.透视时钻套和螺钉。
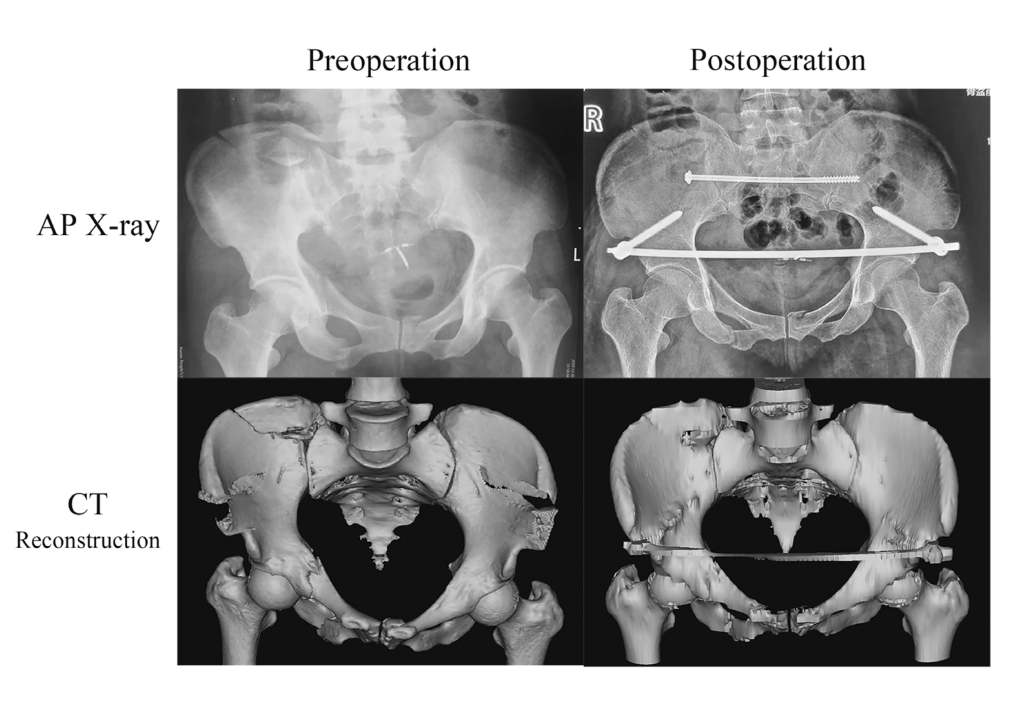
图6 一名44岁女性OTA 61-C1.2型骨折复位前后的典型x线图像变化和三维计算机断层重建。手术的效果非常好。
结果:平均随访时间为10.8个月(7.5个月,12.25个月)(6 ~ 24个月)。平均手术时间为212.5 min (187.5, 272.8 min) (133-562 min),平均复位时间为23.0 min (15.0, 42.5 min) (10-70 min)。平均透视次数为34.0次(31.5次、52.5次)(23 ~ 68次)。第一次尝试成功置入150颗螺钉。所有骨折愈合良好,无并发症。29/30例复位质量优良(Matta评分≤4mm), 1/30例复位质量良好(Matta评分在4 ~ 10mm)。所有患者均在平均4.0个月(3.5个月,5.9个月)(范围3-6)后实现骨愈合,功能恢复良好,平均Majeed评分为91.0(87.8,95.0)(范围71-100)。
结论:磁共振核磁共振成像技术在不延长手术时间的情况下提高了复位精度和辐射暴露。
原始出处:
 A New Technology Using Mixed Reality Surgical Navigation with the Unlocking Closed Reduction Technique Frame to Assist Pelvic Fracture Reduction and Fixation Technical Note.pdf
A New Technology Using Mixed Reality Surgical Navigation with the Unlocking Closed Reduction Technique Frame to Assist Pelvic Fracture Reduction and Fixation Technical Note.pdf
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言



