
JNER:慢性中风患者的机器人双手运动技能学习,轻度受损和中度受损患者与健康人之间的比较
2022-03-17 网络 网络

大多数日常生活活动(ADL)需要双手合作运动。单侧中风可能严重损害双手ADL。中风(re)患者如何学会协调上肢(ULs)在很大程度上尚不清楚。目的是确定慢性幕上卒中患者是否能够实现双手运动技能学习(b
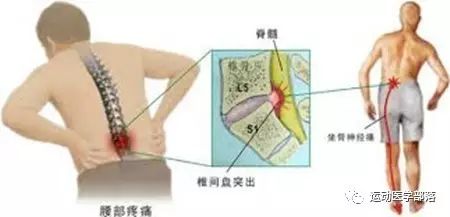
中风是全世界长期残疾的主要原因,最常见的损伤之一是偏瘫,其特征是虚弱、缺乏控制、对侧上肢(UL)和下肢或半身肌肉张力增加,以及日常生活活动(ADL)的独立性恶化,尤其是行走、穿衣或进食。重要的是,其他损伤(如躯体感觉、视觉和认知)无论是单独的还是合并的,也会显著恶化ADL。大多数日常生活能力都需要熟练的双手协调,这可能会因中风而受损,从而导致失去独立性,进而导致生活质量下降50%。尽管在中风急性期提供了康复护理,但四年后仍有30%的患者受到参与限制。有人建议,神经康复不应只集中于损伤的手臂或手,而应考虑更多的双手动作和活动。单侧中风后,对侧UL的损伤会恶化双手行为,因此支持训练两个ULs以实现更好的(双手)ADL功能恢复的重要性。
有趣的是,在双侧合作运动期间(例如,打开瓶子),大多数中风患者的同侧与对侧(受损)UL之间的神经联合保持不变,这表明支持ADL手部合作运动的双侧训练的相关性。在双手训练期间,可以利用各种任务来促进ULs的密集和重复协调运动。针对不同的双手行为,提出了双手任务的分类。大体上,可以区分两种类型的任务:对称运动与同源肌肉(例如,双手同时拿起一个盒子)的任务和不对称运动与非同源肌肉(例如,切一块牛排)的任务。类似地,可以区分两种类型的任务目标:独立目标(例如,一只手同时举起杯子,另一只手同时举起杯子)和共同目标(例如,双手共同完成一项共同任务)。然而,在最熟练的日常生活能力中,双手动作是通过不对称的动作来完成的,这些动作相互配合以实现一个共同的目标,例如,扣上裙子或在驾驶汽车时换档。这种复杂的双手、合作、不对称的技能需要学习。大多数日常生活活动(ADL)需要双手合作运动。单侧中风可能严重损害双手ADL。中风(re)患者如何学会协调上肢(ULs)在很大程度上尚不清楚。目的是确定慢性幕上卒中患者是否能够实现双手运动技能学习(bim MSkL),并比较患者和健康人(HIs)之间的bim MSkL。本文发表在《J NeuroEngineering Rehabil》。
24名患者和10名HI连续3天接受不对称双手协调任务(回路)训练,该任务在REAplan®机器人中作为一项严肃的游戏实施。通过机器人手柄控制ULs的协调运动来控制一个共同的光标,他们在赛道上尽可能多地跑几圈(速度限制),同时将光标保持在轨迹内(精度限制)。主要结果是双手速度/准确性权衡(biSAT),我们使用双手协调系数(biCO)和双手力量(biFOP)作为次要结果。一些临床量表被用来评估运动和认知功能。根据国际功能、残疾和健康分类(ICF),使用了几种临床量表和测试来评估运动和认知功能。我们用Fugl-Meyer上肢测试(FMA-UE)]评估了UL的运动损伤,用方块测试(BBT)评估了手的灵巧度,用Jamar测功机评估了握力,用蒙特利尔认知评估(MoCA)评估了认知损伤。ADL的双手活动限制采用Abilihand问卷进行评估,参与限制采用中风影响量表(SIS)进行测量。
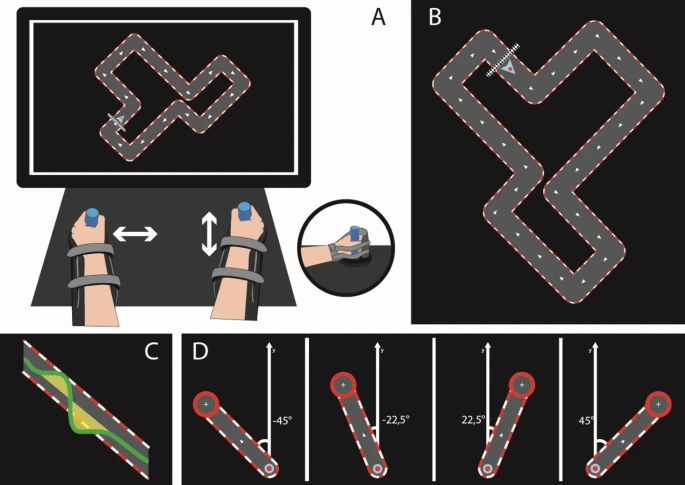
REAplan®上的双手任务
在连续三天的时间里,参与者在双手神经康复机器人上接受评估和训练。在第1天(D1),经过临床评估和短暂的REAplan®熟悉期后,参与者执行了双手接触任务。接下来,他们开始双手回路任务,基线评估包括三个1分钟的区块(休息时间间隔为30秒),然后是20个1分钟的训练区块(休息时间间隔为30秒)。在第2天(D2),重复相同的训练。在最后一天(D3),再次完成相同的训练后,参与者执行新的双手回路,以评估bim MSkL的泛化(3次:1分钟训练/30秒休息),并在D1进行BBT和GF,以评估单手操作的转移。在训练和泛化(NC)评估后,在D3上对双手触碰进行评估,以评估在同一机器人环境中但执行不同任务时的泛化能力。
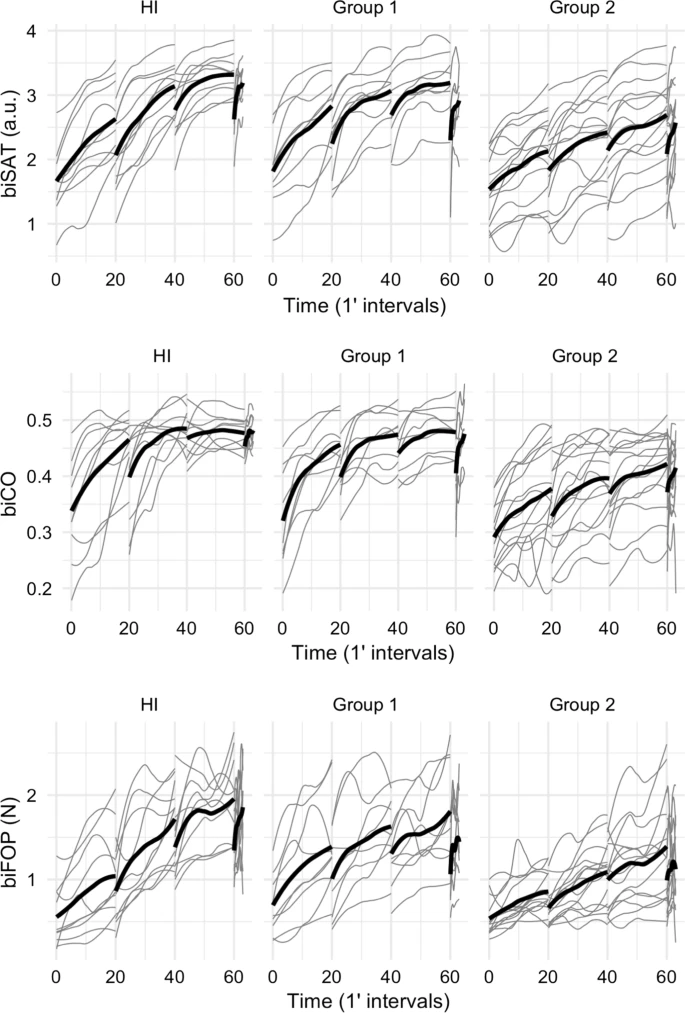
改进biSAT、biCO、biFOP的回路任务
患者在biSAT和biCO上表现出改善。根据biSAT进展情况,HI患者的bim MSkL大于轻中度损伤患者(Fugl-Meyer评估上肢(FMA-UE):28–55,n = 15) 但与轻度运动损伤患者无显著差异(FMA-UE:66,n = 9). biSAT进化与FMA-UE和中风影响量表之间存在显著正相关。HIs患者与第1组和第2组患者之间的基线biSAT没有显著差异。第2组biSAT的总体改善程度明显低于HIs(− 0.5 [− 0.8; − 0.2],p = 0.0003),进展较慢。第一组(FMA-UE) = 66)在HIs和第2组之间表现出中等进展。在HIs和患者中,biSAT的每日进展反映了速度的增加。在HIs和患者中,biCO与biSAT大体上遵循相同的趋势,尽管第2组的基线双手协调性比HIs差。中风慢性期的患者能够学习并保留复杂的双手技能,并将性能改进推广到其他双手或单手任务。HIs的表现优于更严重损伤的患者(第2组,FMA-UE:28–65),他们在bim MSkL的大小和轨迹上都表现出很大的个体间差异。轻度损伤的患者(第1组,FMA-UE:66)在HIs和第2组之间表现为中度进展。
鉴于9名中风慢性期患者的FMA-UE评分正常,我们决定将患者分为两组。第1组(FMA-UE) = 66,n = 9) 和HIs相比,biSAT的总体进展并没有显著差异。第2组(FMA-UE) < 66,n = 15) biSAT的总体进展明显低于HIs。然而,第2组的患者达到了bim MSkL,包括保留和泛化,并且似乎没有达到上限;然而,在进一步的训练后,他们的能力是否最终能与第一组相匹配还没有确定。
总之,HI患者和在机器人设备上接受慢性中风训练的患者都达到了bim MSkL,尽管受损程度越高的患者效率越低。
Gerardin, E., Bontemps, D., Babuin, NT. et al. Bimanual motor skill learning with robotics in chronic stroke: comparison between minimally impaired and moderately impaired patients, and healthy individuals. J NeuroEngineering Rehabil 19, 28 (2022). https://doi.org/10.1186/s12984-022-01009-3
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言













#健康人#
0
#轻度受损#
63
#机器人#
76
#中风患者#
55
#机器#
51