
J Clin Exp Dent:使用计算机辅助的静态和动态导航系统与AR设备比较颧种植体放置的准确性
2024-01-11 医路坦克 MedSci原创 发表于上海

本文分析比较静态导航手术、动态导航手术和增强现实器械在颧骨种植体植入中的准确性。
严重萎缩、完全无牙的上颌的康复是最受关注的问题,由于缺乏可用骨,这些手术对牙科医生来说是一个挑战,这阻碍了常规长度的种植体的放置。使用骨增强技术来增加骨可用性,并实现随后的种植体支持康复,包括窦提升、移植手术和邻位移植(有或没有LeFort I型截骨术),报道的成功率在60-90%之间。然而,这些技术大多需要延迟入路和两期或更长时间的手术,其中骨移植增加了术后并发症的潜在风险。此外,上颌萎缩无牙患者的骨可用性有限和/或骨密度低不足与更高的种植失败率有关。因此,一些临床医生建议颧骨种植体作为修复全无牙上颌的替代方法,而不需要植骨手术。这种使用颧骨种植体的康复技术已被用于出现严重上颌吸收的患者,并使用传统长度的牙种植体,据报道存活率从96%到100%不等。遗憾的是,也有潜在的术后并发症的风险,可能会影响上颌窦,特别是在鼻窦内颧种植牙放置的情况下。据报道,鼻窦炎的发病率高达5 - 6%(范围:0-26.6%);话虽如此,抗生素治疗也已被证明对所有患者广泛有效。此外,研究还发现在使用颧牙种植体的种植体支持修复体中存在假体并发症;这些影响包括覆盖义齿固位、黏膜过度生长、固定义齿断裂、增生和不适。此外,临床医生还报道了术中和术后并发症,包括颧骨骨折、感染、烧灼感、植入物开窗以及因植入物突出下眼睑而引起的不适。
颧骨种植体的准确性,以减少术中和术后种植体的潜在并发症,特别是在极度萎缩的无牙上颌。此外,这种基于锥形束计算机断层扫描(CBCT)的计算机辅助种植手术技术也显示出提高了将假体数字规划转移到下颌的准确性。近年来,牙科手术领域已经看到使用基于图像数据的导航技术来放置牙种植体,以改善手术结果并避免该治疗过程所带来的潜在风险。这种替代手术方法是利用术前CBCT扫描和专门的3D植入计划软件开发的,可以更准确地放置植入物。一般来说,使用计算机辅助植入手术(CAIS)技术有两种不同的外科植入技术:动态(d-CAIS)和静态(s-CAIS)。Vrielinck等人使用基于术前CT扫描的手术模板来提高颧骨种植体放置的准确性,从而提高生存率。Chow等人使用这种手术方案,使颧种植体即刻咬合负荷成为可能。d-CAIS系统可以检测和跟踪光学参考标记的位置,这些标记通过跟踪系统阵列放置在患者和手术器械上。这两种CAIS技术都得到了广泛的研究,结果表明它们能够高度精确地放置牙种植体)。s-CAIS系统在冠状全球和根尖全球的平均水平偏差分别为1.2 mm (1.04 ~ 1.44 mm)和1.4 mm (1.28 ~ 1.58 mm),平均角偏差为3.5°(3.0 ~ 3.96°)(24)。研究发现,d-CAIS系统在冠状全球产生0.81 mm的偏差,在根尖全球产生0.91 mm的偏差,角偏差为3.807º。这些发现的价值还有待比较。
增强现实设备(AR)也被用于改善可视化,并通过实验提高常规长度牙种植体植入的准确性;然而,关于这些技术的已发表文献很少,需要临床试验来更好地评估这些技术的准确性。增强现实设备以前从未在牙科种植领域使用过,由于其精确的跟踪技术和小尺寸,它们可能被证明是有用的。
本体外研究的目的是评估和比较使用静态导航手术、动态导航手术、AR设备和徒手手术方法在手术模型上放置颧骨种植体的准确性。零假设(H0)表明,在对比使用静态导航手术、动态导航手术和增强现实设备放置颧骨种植体的准确性时,没有差异。
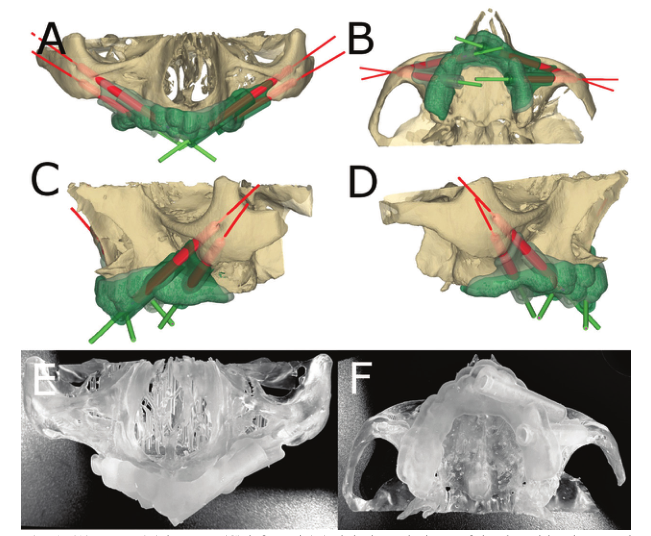
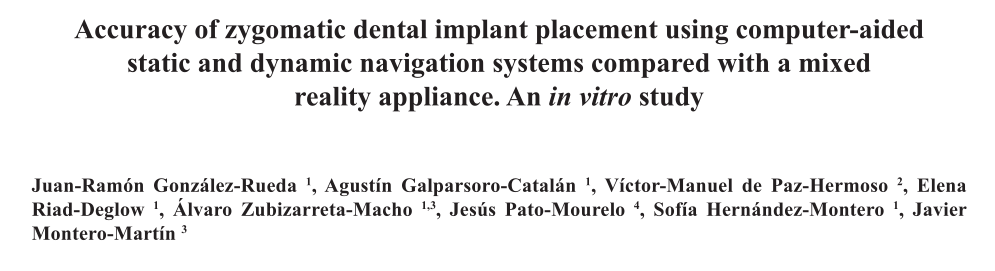
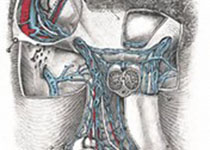
图1:(A)牙种植体的正面视图,(B)底部视图,(C)左侧视图,(D)右侧视图和虚拟模板规划。(E)手术模板调整在实验模型上的正面视图和(F)底部视图。
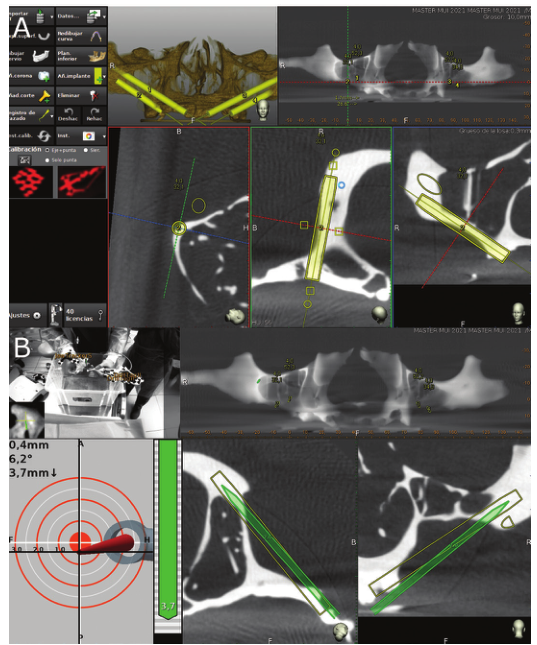
图2:(A)动态导航手术器械颧骨种植体放置的治疗计划软件术前计划和(B)颧骨种植体放置期间的跟踪程序。
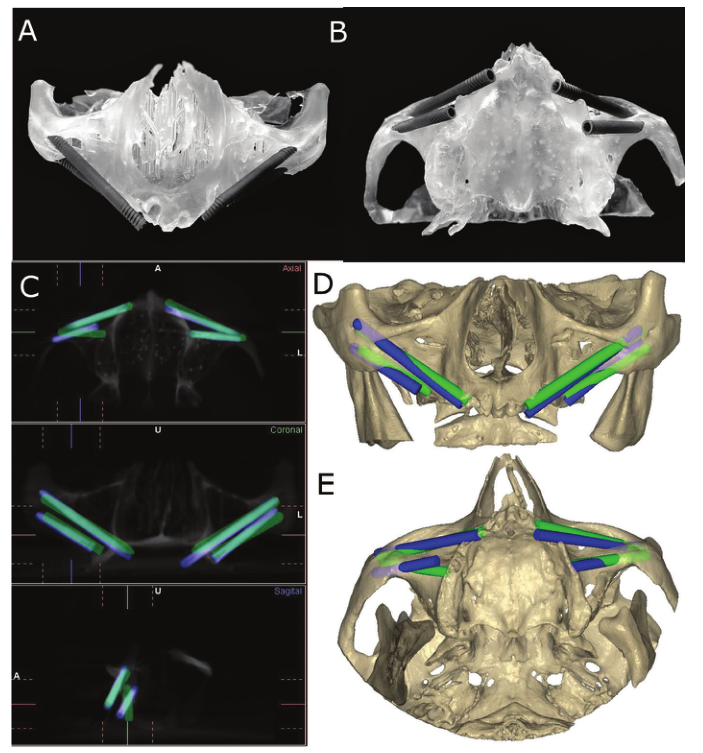
图3:(A)放置在实验模型上的颧种植体的正面视图和(B)底部视图。(C) CBCT图像,(D)术前计划(绿色圆柱体)和术后颧骨种植体放置(蓝色圆柱体)之间测量过程的正面视图和(E)底部视图。
材料和方法:80例颧骨种植体随机分为四个研究组:A:静态导航种植体手术(n = 20) (GI);B:动态导航植入手术(n = 20) (NI);C:增强现实器械植入(n = 20) (ARI)和D:徒手技术(n = 20) (FHI)。术前对现有情况进行锥形束计算机断层扫描(CBCT)扫描,以计划计算机辅助植入手术研究组的手术入路。4个颧骨种植体放置在立体光刻制造的解剖学聚氨酯模型(n = 20)中,并进行术后CBCT扫描。随后,将术前计划和术后CBCT扫描上传到种植体软件中,分析冠状全局、根尖全局和角度偏差。结果使用线性回归模型进行分析,并采用重复测量来评估分组、位置以及两个变量之间的相互作用的差异。如果发现有统计学意义的差异,则在组/位置之间进行2对2比较。
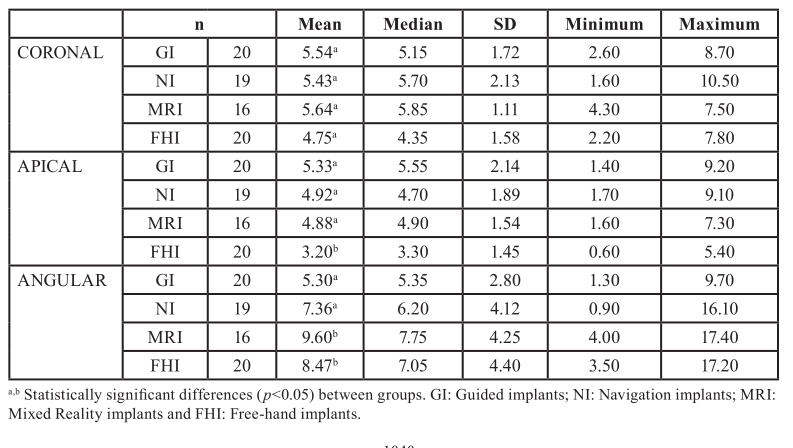
表1:使用静态导航系统引导种植体(GI)的冠状入口点偏差(mm)、根尖端点偏差(mm)和角度偏差(°)的描述性值;导航植入物(NI)使用动态导航系统。
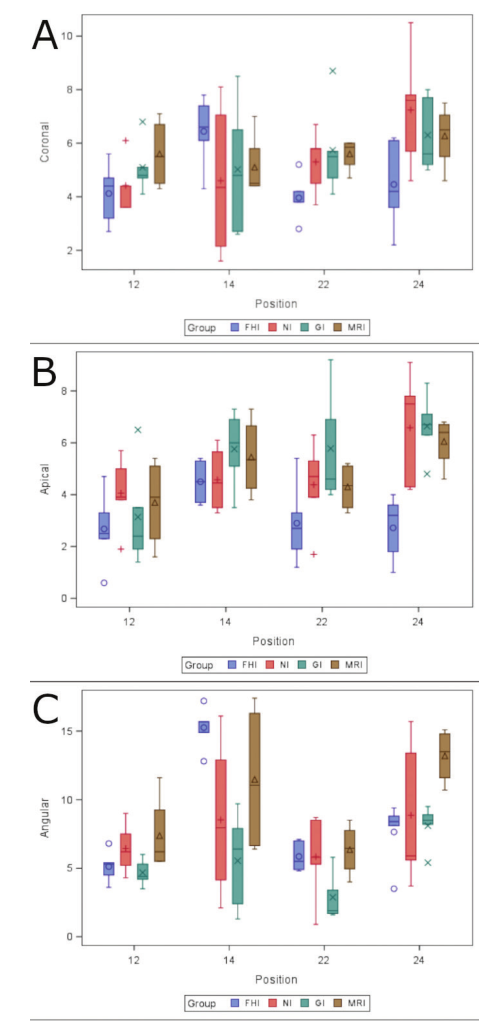
图4:(A)研究组在冠状面、(B)根尖和(C)种植体位置的角度偏差箱形图。中位数由每个框中的水平线表示。
结果:GI(5.54±1.72 mm)、NI(5.43±2.13 mm)、ARI(5.64±1.11 mm)、FHI(4.75±1.58 mm)的冠状面总体偏差差异无统计学意义。FHI与NI(4.92±1.89 mm) (p = 0.0078)、GI(5.33±2.14 mm) (p = 0.0005)、ARI(4.88±1.54 mm) (p = 0.0132)的根尖总体偏差差异均有统计学意义。此外,FHI(8.47º±4.40º)与NI(7.36º±4.12º)、GI(5.30º±2.80º)与ARI(9.60º±4.25º)的角度偏差差异也有统计学意义(p = 0.0005)。
结论:与计算机辅助种植技术相比,徒手技术对颧种植体的放置精度更高,颧种植体在前区放置比在后区放置更准确。然而,这是一项体外研究,必须进行进一步的临床研究以将结果推断到临床环境中。
原始出处:
 J Clin Exp Dent:使用计算机辅助的静态和动态导航系统与AR设备比较颧种植体放置的准确性
J Clin Exp Dent:使用计算机辅助的静态和动态导航系统与AR设备比较颧种植体放置的准确性
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言







#AR# #颧种植体# #静态导航手术# #动态导航手术# #放置准确性#
26