
JNER:中风后运动能力缺陷的观察:下肢运动协调测试(LEMOCOT)的精细分析
2021-10-28 MedSci原创 MedSci原创

本文着重于量化中风患者(PwS)下肢运动协调测试(LEMOCOT)中表现的误差(即准确性)。
运动协调可以定义为人在在空间和时间中产生组织运动的能力。在行走过程中,身体各部分之间的相对运动需要能够适应内部和外部需求。中风幸存者经常表现出上下肢运动协调能力受损,这可能导致日常活动能力受限、参与度降低和生活质量下。Fugl-Meyer评估是评估中风后下肢和上肢损伤的常用方法。在Fugl-Meyer评估中,协调性被测量为受影响程度较高和较低的肢体之间五次交替接触目标的时间差。但是这限制了检测和量化随时间变化的微小变化的能力。根据关节运动的平滑度、平直度、误差大小、速度和范围,对终点运动到目标的定量评估可能会提供一个更精确和信息量表来描述中风后的运动控制缺陷,而不仅仅是时间。

本文着重于量化中风患者(PwS)下肢运动协调测试(LEMOCOT)中表现的误差(即准确性)。LEMOCOT是一种基于绩效的协调措施。在坐着进行的测试中,要求参与者尽可能快速准确地移动下肢,并交替用大脚趾触碰地板上的近端和远端目标。20秒内触及的目标数量构成分数。LEMOCOT证明了适当的测量属性,即PwS中的内部、内部评分员和测试-再测试信度和结构效度。
在本文探索性研究中,LEMOCOT是在配备有力传感器的电子垫上进行的,以量化精度(即终点绝对误差)和一致性(即终点变量误差)方面的运动性能。计算了端点位置和压力中心COP位置的准确性和一致性。这些措施可能会对中风后的运动缺陷提供更详细和全面的评估,了解PwS对瘫痪和非瘫痪腿的定向伸展效果如何,可能与运动和平衡控制任务的康复相关,尤其是在脚位误差较小的活动中,如通过杂乱的行进路径或跨过障碍物。本文开发了一种算法来自动评估LEMOCOT分数,并分析运动性能参数。本文发表在《神经病学,神经外科学和精神病学杂志》上()。

20名PwS和20名健康对照参与了这项横断面研究。PwS是在以色列Ofakim的Adi Negev Nahalat Eran康复中心住院期间招募的。PwS的纳入标准包括首次单侧缺血性或出血性卒中,并且能够自愿伸展和弯曲受影响的腿以达到试验目标。排除标准包括其他肌肉骨骼或神经损伤、可能干扰任务执行的疼痛和临床不稳定性。对照组是在工作人员中招募的,没有已知的肌肉骨骼或神经运动障碍。所有参与者都签署了知情同意书。
近端和远端靶点在电子垫上标记为相距30 cm,电子垫上有10240个微型力传感器,每个传感器0.80 × 0.80厘米(Zebris FDM-T跑步机,Zebris Medical GmbH,德国)。使用制造商提供的软件在60 Hz采样频率下获取力数据。测试前,将轴的原点设置在近端目标的中心。参与者坐在座椅高度为44厘米的椅子上,赤脚进行测试。在熟悉试验后,要求参与者用大脚趾交替触摸近端和远端目标,尽可能快且准确,持续20秒。PwS首先用他们的非瘫痪腿进行测试,然后是他们的瘫痪腿,健康参与者首先用他们的优势腿(即用来踢球的腿)进行测试,然后是他们的非优势腿。在测试过程中,物理治疗师计算了目标接触的次数。开发了专用算法和MATLAB脚本(MathWorks Inc.)并用于分析力数据。
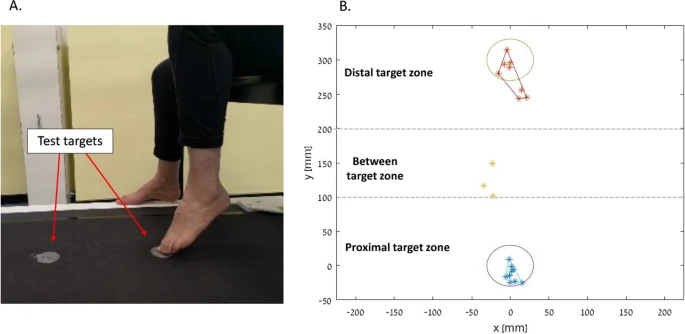
算法将被测表面分为3个区域:近端目标区域(距离y轴上近端目标中心(即原点)100 mm);远侧靶区(y轴上距远侧靶中心100 mm)和靶区之间。蓝色和红色点分别代表近端和远端靶点分析中包含的接触。黄点表示目标之间的接触。
PwS接触的目标具有更大的脚面,并且显示了端点位置和COP位置之间的更大距离。在控制目标内接触的次数后,观察到轻瘫腿的端点绝对误差和可变误差大于非轻瘫腿和对照腿的端点绝对误差和可变误差。此外,COP变量误差区分为轻瘫、非轻瘫和控制腿,该参数与目标计数无关。Fugl-Meyer评估与误差参数之间存在负相关。本文发现考官的计数与本文的算法确定的计数之间存在显著相关性。这种相关性解释了样本中97%的方差,表明本文的算法产生了有效的结果。这一点非常重要,因为测试结果可以在不依赖于测试仪的情况下进行计算。然而,对方法之间的一致性以及线性模型中的正常数项的估计表明,测试人员的计数始终大于算法的软件产生的计数。这些发现可能表明,考官很难准确地计算目标接触的次数。
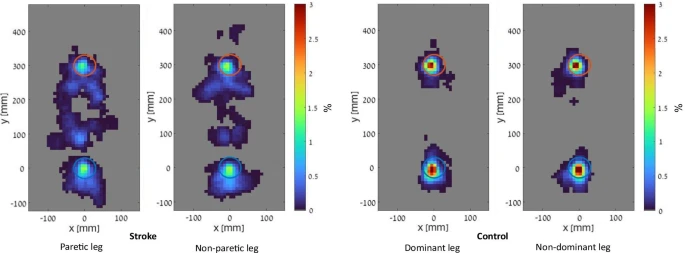
彩色区域中的触摸百分比,较暖的颜色表示触摸次数较多。蓝色和红色圆圈分别代表近端和远端靶点
本文量化下肢运动协调测试(LEMOCOT)中的误差参数。我探索性分析包括几个参数,这些参数被认为反映了运动输出的准确性和可变性。脚接触地面的表面很小(仅代表大脚趾的表面),并且端点位置和COP位置是一致的。本文发现PwS的平均接触面以及端点位置和COP位置之间的平均距离比对照组大。研究结果表明,更粗大的控制/更不灵活的控制或用于将大脚趾放在目标上的补偿策略。此外,本研究中使用的其他参数(通常用于量化误差的指标)在各组和腿部之间也存在差异。具体而言,在终点绝对误差、终点变量误差和COP变量误差方面,瘫痪腿、非瘫痪腿和对照组之间存在显著差异。对于COP绝对误差,注意到非瘫痪腿的误差比瘫痪腿小,但是,它没有达到显著性水平。
PwS在所有结果测量中的表现均低于对照组。几个误差参数表明(轻瘫腿、非轻瘫腿和对照组)之间存在差异,并且与目标接触计数无关,研究结果显示了传统LEMOCOT评分无法识别的运动缺陷。
Handelzalts, S., Koren, Y., Goldhamer, N. et al. Insights into motor performance deficits after stroke: an automated and refined analysis of the lower-extremity motor coordination test (LEMOCOT). J NeuroEngineering Rehabil 18, 155 (2021). https://doi.org/10.1186/s12984-021-00950-z
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言












#运动能力#
54