
Arthroplast:机器人辅助全膝关节翻修术中组件前后位置的三维比较
2024-01-18 医路坦克 MedSci原创 发表于上海

本研究的目的是比较在患者队列中实现平衡间隙所必需的膝关节置换术部件的术前和术后位置的三维变化。
每年有近90万美国人通过膝关节置换术缓解疼痛并恢复功能,预计到2030年,由于老龄化人口希望保持活跃,这一数字将增加一倍以上。随着预期的初级膝关节置换术的数量继续增长,翻修手术也将继续增长。美国关节置换术登记中心(2022)的最新报告显示,感染、无菌性松动、机械并发症和不稳定占美国膝关节翻修手术80%以上的原因。例如,从股骨远端移除额外的骨头,过度切除后髁,以及增加胫骨的坡度会导致间隙不对称,从而导致假体不稳定。作为回应,植入物公司已经尝试通过机器人辅助手术来标准化原发性全膝关节置换术(TKA),但机器人辅助手术在翻修方案中的应用仍然很大程度上是未知的。由于骨丢失、韧带衰减和缺乏适当的计算机软件,目前的技术很难适应翻修方案。
目前的假体系统依靠髓内(IM)固定来绕过翻修膝关节置换术中缺骨的区域。较小的完全胶结的柄可以很容易地使用,但较长的骨干接合的IM柄被发现会影响翻修假体的最终位置。从解剖学上讲,由于胫骨骨骺中心与骨干中心不在一条直线上,因此很难精确定位长柄胫骨翻修部件。同样,当股骨翻修假体的长柄接触股骨矢状弓时,间隙平衡可能被破坏。
因此,种植体增强和偏移耦合器的发展,以改善骨接触和微调种植体定位。不幸的是,偏移组件只允许在切除平面内微调几毫米,但可以继续抑制修复植入物的理想放置。通常,在翻修Tka期间使用约束聚乙烯组件来补充植入翻修植入物后的残余不稳定性。
通过使用先前描述的技术,可以在修订TKA期间独立于IM杆定位修订组件。通过对当前机器人辅助工作流程的操作,作者完成了一系列机器人辅助翻修Tka,以解决出现感染、无菌性松动、机械并发症和不稳定的各种患者。本研究的目的是比较在患者队列中实现平衡间隙所必需的膝关节置换术部件的术前和术后位置的三维变化。假设在机器人翻修Tka中,股骨后髁偏移比股骨远端测量对间隙稳定性更重要。
方法:连续进行25例超说明书机器人辅助修正TKA。在虚拟翻修股骨和胫骨假体以实现“平衡”的内侧和外侧屈伸间隙后,取出现有的初级植入物(PI),并用机械臂系统进行骨切割。术前将PI的冠状、矢状和轴向位置与每个受试者的机器人修复植入物(RRI)的最终计划位置进行比较。利用PI和RRI取向之间的毫米和度的绝对差异完成了重复测量方差分析。

表1 患者人口统计

图1所示。机器人种植体规划页面描述了机器人修复种植体(RRI)的最终位置(绿色),覆盖在初级种植体(PI)上(白色)。右上:注意RRI和PI之间增加的后偏置,这是平衡TKA所必需的。金属伪影可以模糊骨标记,但通过查看多片CT扫描,我们可以最好地估计骨标记的位置。由于MAKO机器人系统的TKA修正尚未明确,修正植入物和髓内支架目前还不能用于虚拟模板
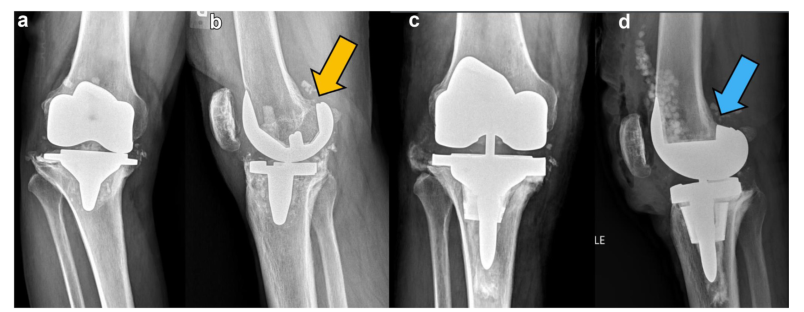
图2。(a)不稳定TKA的正位和(b)术前侧位x线片,无菌性松动的胫骨部件下沉到内翻位置。在食指手术中,关节线向下移。股骨组成部分轻微远端(箭头),显示股骨后髁处有一个台阶。(c)术后正位片和(d)侧位片显示与术前x线片相比,股骨假体屈曲伴股骨假体后侧偏移增加。胫骨组成部分现在由干骺端锥体和内侧增长支撑。注意前翼缘靠在前皮质上,股骨组成部分的后侧与剩余的股骨融合,无台阶(箭头)。关节线轻度内翻是运动对齐改良TKA的特征。基于整个膝关节活动范围内平衡的韧带张力,关节线已间接恢复。
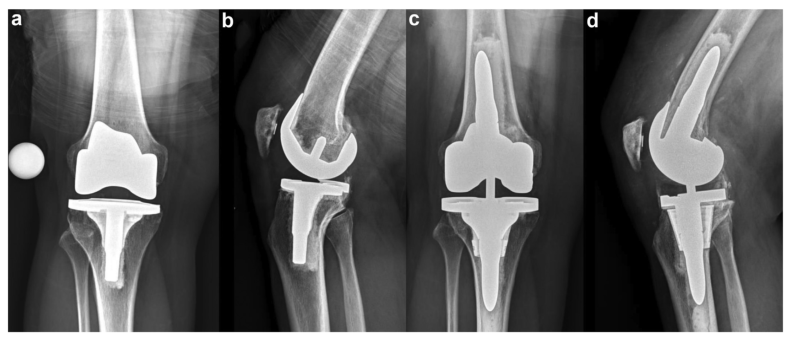
图3。(a)不稳定TKA的正位片和(b)术前侧位片。股骨假体轻微伸展,股骨后髁过度切除,胫骨假体后斜度增加,导致该患者屈曲不稳定。(c)术后正位片和(d)侧位片显示平衡翻修TKA,股骨组成部分(3度)屈曲,股骨后部增强以恢复失去的股骨后髁偏移。带有胫骨干骺端锥的短复位IM柄是机器人辅助复位TKA的特点。

表3 从骨标记处测量植入物(单位:毫米)。
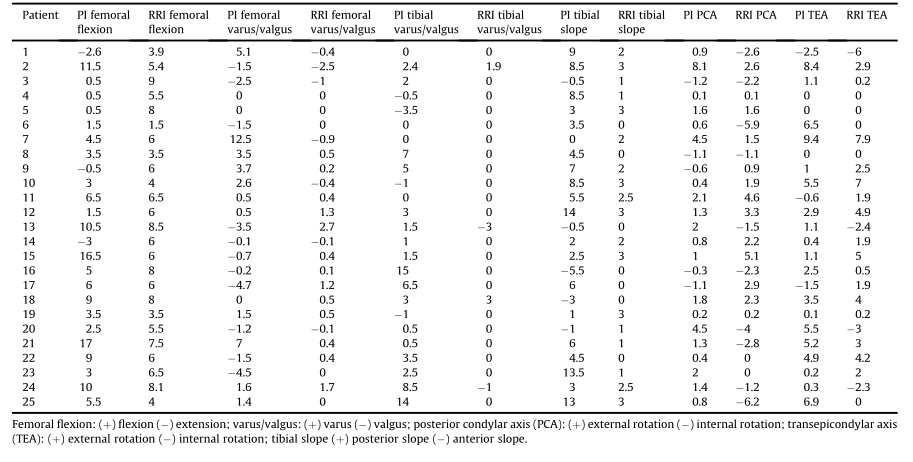
表4 种植体测量(以度为单位)。
结果:术中,虚拟间隙在计划软件内得到平衡,计划成功执行。与PI相比,RRI的后髁偏移和胫骨假体定位在统计学上有显著差异。PI和RRI之间的股骨远端成分值没有差异。
结论:假体的矢状面对齐,特别是股骨后髁偏移量和胫骨假体斜率,对于使用机械臂系统的稳定假体TKA具有统计学意义。其他潜在的好处可能包括适当的种植体大小,它可以影响韧带张力,这对功能翻修TKA很重要。未来的研究和软件迭代将需要确定机器人辅助修订TKA的整体准确性和实用性。
原始出处:
 Arthroplast:机器人辅助全膝关节翻修术中组件前后位置的三维比较
Arthroplast:机器人辅助全膝关节翻修术中组件前后位置的三维比较
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言










#机器人辅助# #全膝关节翻修术# #术中组件前后位置#
83