
J Med Internet Res:增强现实辅助导航在牙种植体手术中的准确性
2023-04-26 医路 MedSci原创 发表于上海

目前的动态牙种植体引导系统通常由两个主要部分组成:一个光学跟踪装置,记录定位在患者和手术器械上的被动或主动跟踪阵列,以及一个导航系统,在CBCT图像上显示钻头的位置。
牙种植体植入的临床成功需要适当的术前种植计划以及有效和准确的手术过程。计算机辅助种植手术(CAIS),也被称为引导牙种植手术,是一种比传统的徒手(FH)方法更有效和更准确的方法。根据手术引导阶段的不同,CAIS可分为静态系统和动态系统。虽然这两个系统共享相似的术前计划阶段,其中牙种植定位过程是基于锥束计算机断层扫描(CBCT)和使用专门的牙种植计划软件程序的患者的口腔内扫描图像来模拟的,但它们在手术阶段有所不同。在静态CAI的手术阶段,可以使用静态引导模板进行种植引导手术,该模板通过引导套筒或钥匙将牙种植体的计划位置转移到手术部位,具体取决于特定的引导系统。与静态方法不同,动态cais使用动态导航系统,该系统允许实时跟踪相对于患者的手术器械,并在牙种植体放置期间动态地在cbct上显示钻头的位置。
目前的动态牙种植体引导系统通常由两个主要部分组成:一个光学跟踪装置,记录定位在患者和手术器械上的被动或主动跟踪阵列,以及一个导航系统,在CBCT图像上显示钻头的位置。动态方法的优点包括手术钻头涉及关键解剖结构的实时定位,无需刚性模板即可随手术计划动态导航钻头,并在手术过程中为操作者提供连续的实时反馈。此外,动态CAIS的准确性在临床上是可以接受的;因此,动态CAIS可以被认为是一种很有前途的精确种植体放置方法。通常,动态CAIS在单独的屏幕监视器上显示跟踪图像。因此,操作者在控制仪器的同时,视线要远离口腔,跟随导航。这种限制不仅会中断手术流程,带来手术失误的风险,而且还会引起手术人员在手术过程中的焦虑最近,增强现实(AR)——一种创新的图像技术,通过将数字数据与真实环境相结合,产生身临其境的手术环境——已被纳入动态牙科种植引导系统,帮助操作员在实际手术视野上直接可视化数字导航信息,以提高手术实时性。由于图像识别和跟踪技术的快速发展,AR技术越来越多地应用于医疗和牙科领域。几种具有不同特性的ar辅助导航系统已经被引入,它们的精度引起了人们的极大兴趣。然而,与静态和传统的动态导航系统相比,ar辅助导航系统在文献中的记录较少。据我们所知,目前还没有关于ar辅助动态牙种植引导手术准确性的系统综述和荟萃分析研究发表。
因此,我们以ar辅助导航系统的形式研究了创新成像技术的准确性,该系统可以在真实环境中合并数字图像,以帮助口腔外科医生可视化实际手术部位的虚拟计划种植体位置。本研究的主要目的是评估最近开发的AR辅助种植体导航系统(AR导航)在计划种植体和放置种植体之间的位置偏差方面的准确性。
本研究的第二个目的是比较AR导航与其他种植体放置方法的准确性,包括FH方法、基于模板的静态引导(TG)方法和传统导航(CN)方法。
本研究旨在评估AR导航种植牙的准确性,并将其与广泛使用的种植方法进行比较,包括手动法(FH)、基于模板的静态引导(TG)和传统导航(CN)。
用于自动搜索每个数据源的布尔运算符(Total N=425)。

本研究的纳入和排除标准。

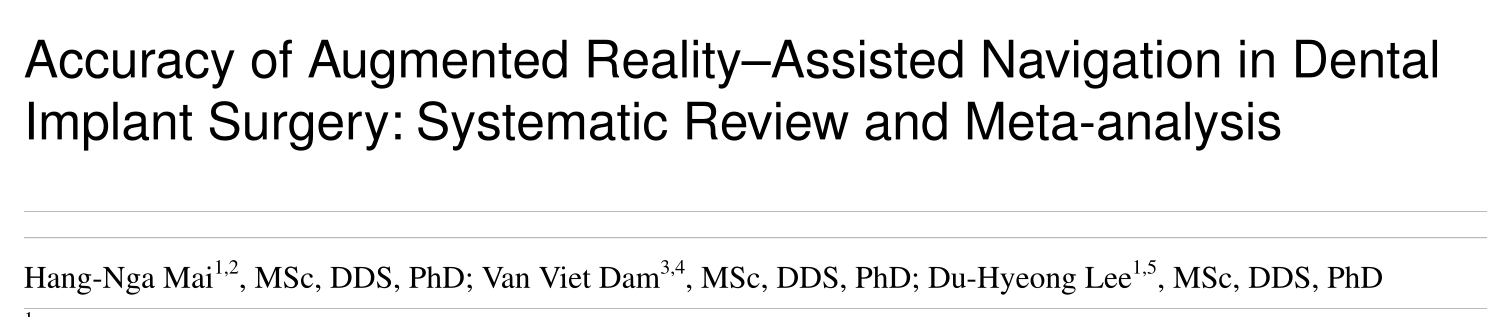
计划植入物与放置植入物之间的位置偏差
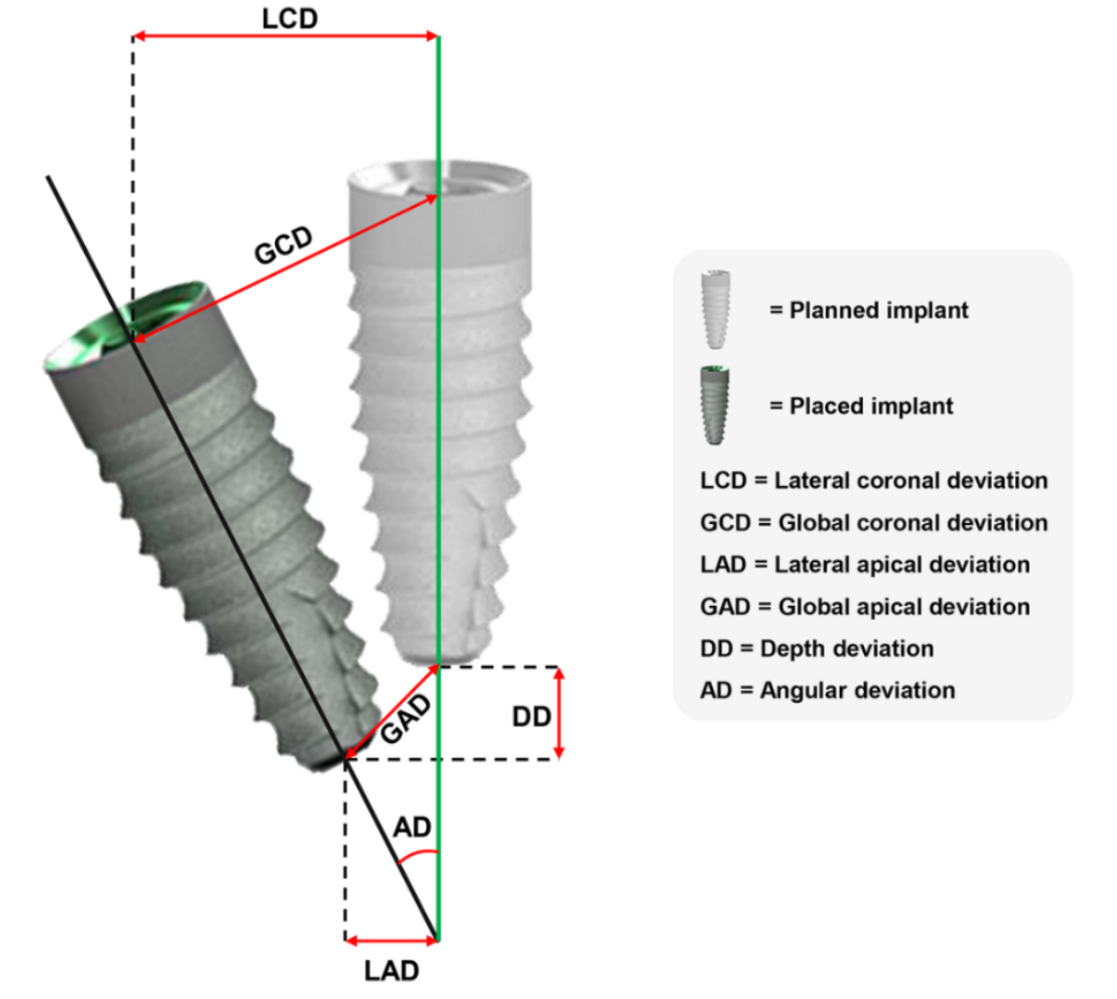
增强现实图像显示设备。(A) OST HMD设备。(b) VST hmd。(C) IV图像叠加装置。HMD:头戴式显示器;四:整体式摄像;OST:光学透视;VST:视频透视。
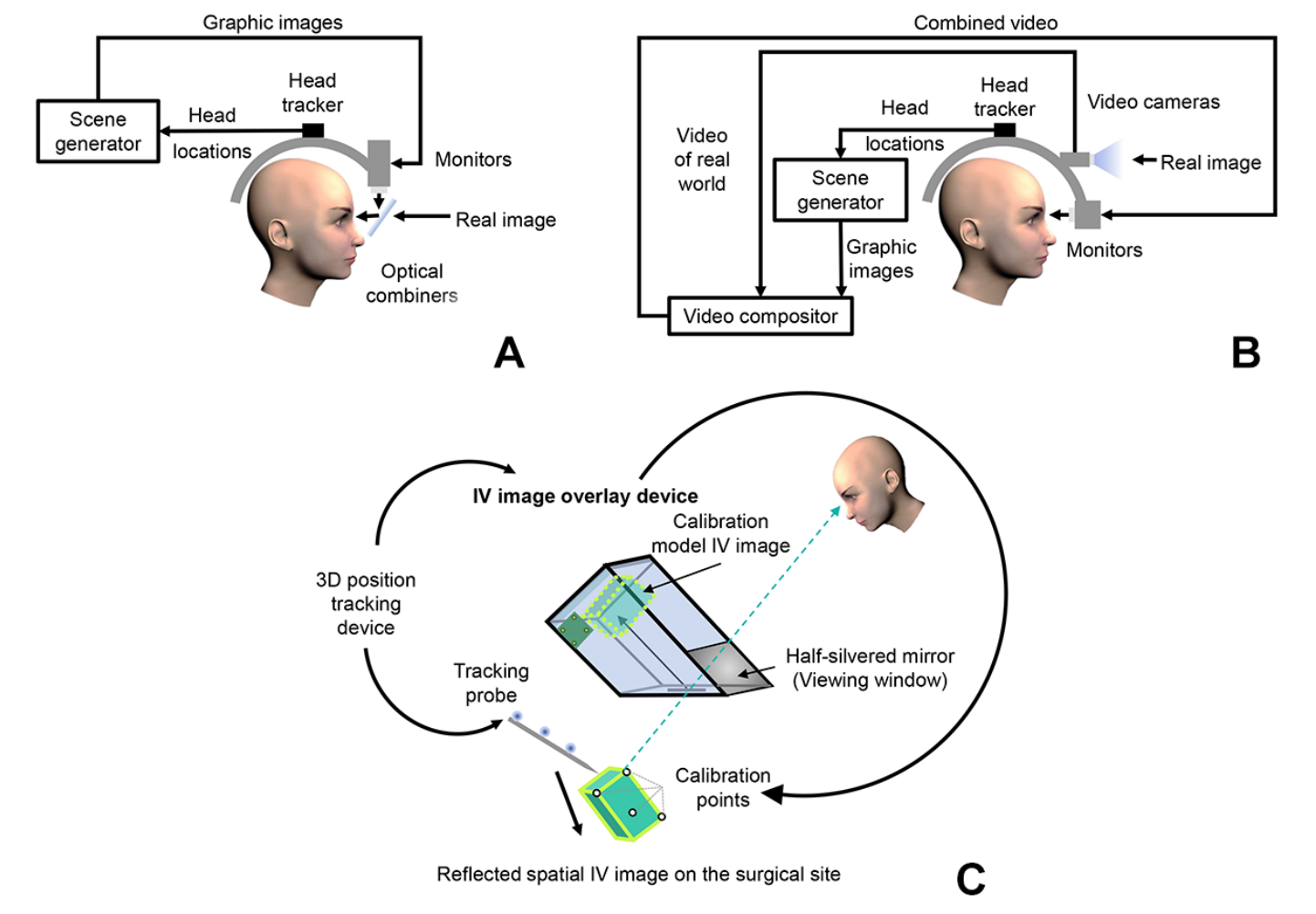
增强现实(AR)植牙导航系统。CBCT:锥束计算机断层扫描;HMD:头戴式显示设备;四:整体式摄像
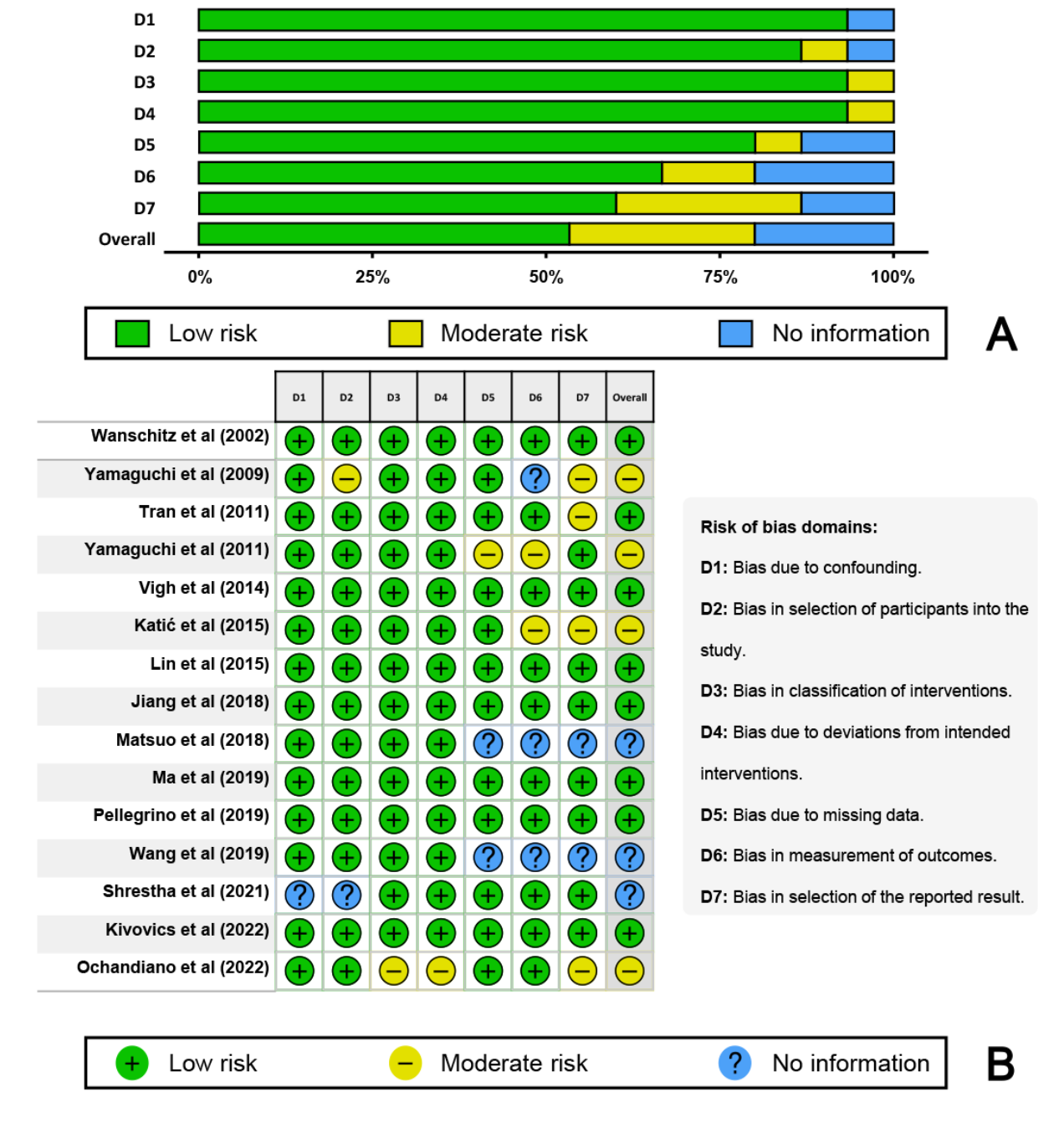
使用非随机干预研究中的偏倚风险(ROBINS-I)工具进行偏倚风险评估。(A)加权条形图显示了每个偏置域内的偏置风险判断的分布,(B)每个研究的域级判断的交通灯图。
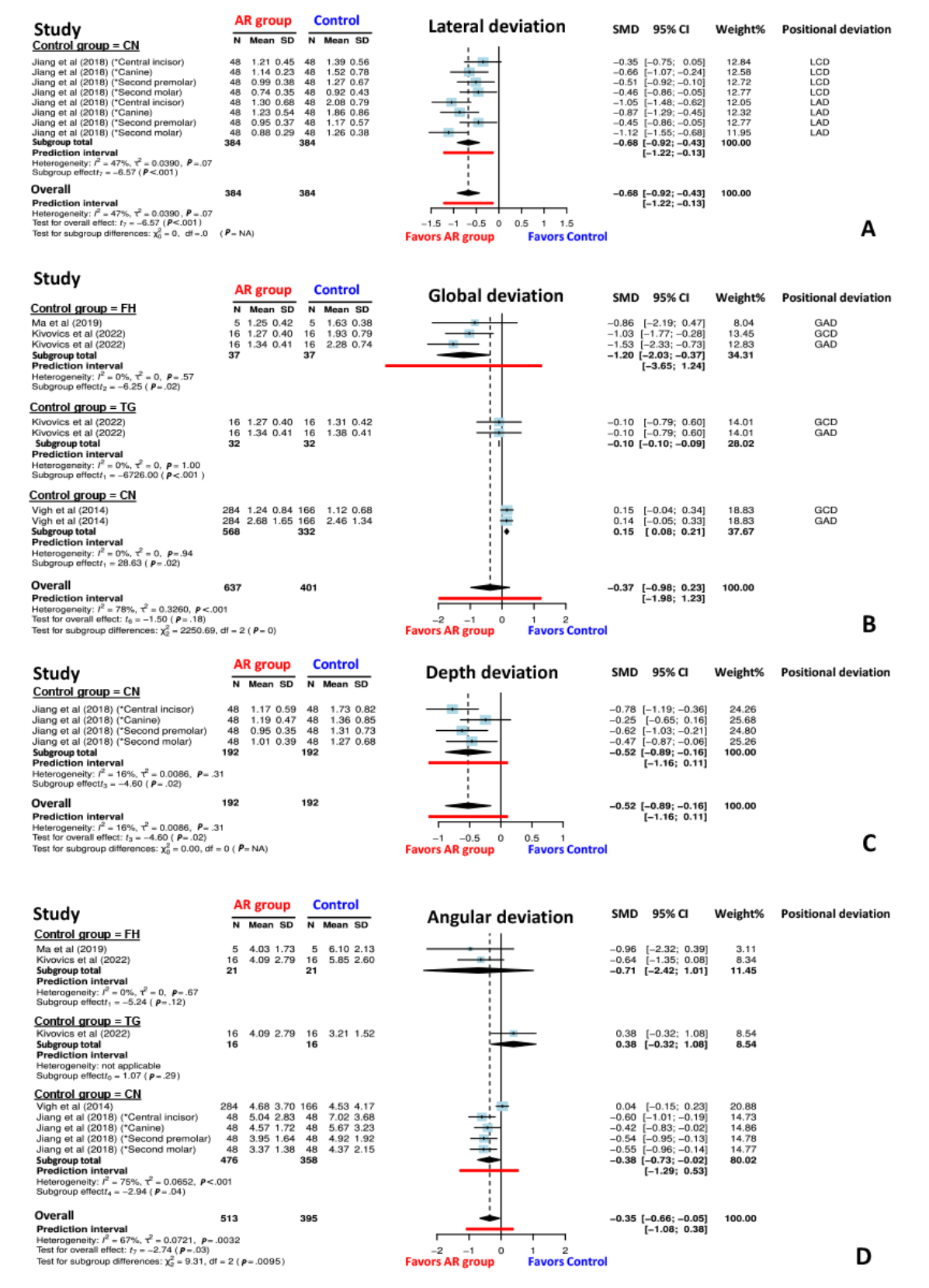
森林图比较了使用增强现实(AR)导航与徒手(FH)、基于模板的静态引导系统(TG)和传统导航(CN)方法放置的植入物的位置偏差。(A)横向偏差(mm)。(B)全局偏差(mm)。(C)深度偏差(mm)。(D)角偏差(°)。GAD:全球根尖偏差;GCD:全球日冕偏移;LAD:外侧根尖偏;LCD:侧冠状偏移。
方法:应用个人检索策略检索PubMed(MEDLINE)、Scope us、Science Direct、Cochrane图书馆和Google Scholar,检索截止2022年3月21日的文章。这项研究是根据PRISMA(系统评价和荟萃分析的首选报告项目)指南进行的,并登记在国际预期系统评价登记册(PROSPERO)数据库。评估使用AR辅助种植体导航系统放置的牙种植体的位置偏差的同行评议的期刊文章也包括在内。采用Cohen d统计功率分析研究数据集之间标准化均数差异(SMDS)的效应大小估计和顺应性。
结果:在检索到的425篇文章中,15篇符合叙述性综述,8篇纳入单臂Meta分析,4篇纳入双臂Meta分析。AR导航下种植体的平均侧位偏差为0.90(95%CI 0.78~1.02)mm,平均角度偏差为1.18(95%CI 0.95~1.41)mm,平均深度偏差为0.78(95%CI 0.48~1.08)mm,平均角度偏差为3.96°(95%CI 3.45°~4.48°)。AR导航的准确性显著高于FH法(SMD=−1.01;95%CI−1.47~−0.55;P<.001)和CN法(SMD=−0.46;95%CI−0.64~−0.29;P<.001)。然而,AR导航和TG方法的准确性相似(SMD=0.06;95%CI−为0.62~0.74;P=0.73)。
结论:AR导航的种植体放置的位置偏差在安全区内,提示AR导航方法的准确性在临床上可以接受。此外,AR种植体导航的准确性与目前推荐的牙种植体引导手术方法TG相当,优于传统的FH和CN方法。这篇综述强调了使用AR导航作为一种有效和准确的牙种植体植入的沉浸式手术指南的可能性。
原始出处:
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言










签到学习
99