世界上第一个机器人心脏手术研究发表
2024-12-14 我爱瓣膜 我爱瓣膜 发表于陕西省

西弗吉尼亚大学心脏与血管研究所团队完成世界首例机器人主动脉瓣置换术和冠状动脉搭桥术(RAVCAB),介绍术前准备、患者情况、手术过程及遇到的问题、手术结果,探讨其意义及与其他治疗方式的关联。
2024 年 10 月,位于西弗吉尼亚州摩根敦的西弗吉尼亚大学心脏与血管研究所的心脏外科医生进行了世界上第一例机器人主动脉瓣置换术和冠状动脉搭桥术 (RAVCAB) 手术。现在,这项历史性手术背后的团队首次分享了它的完整故事,在胸外科医师协会的官方期刊 The Annals of Thoracic Surgery 上发表了对该程序的深入研究。[1]
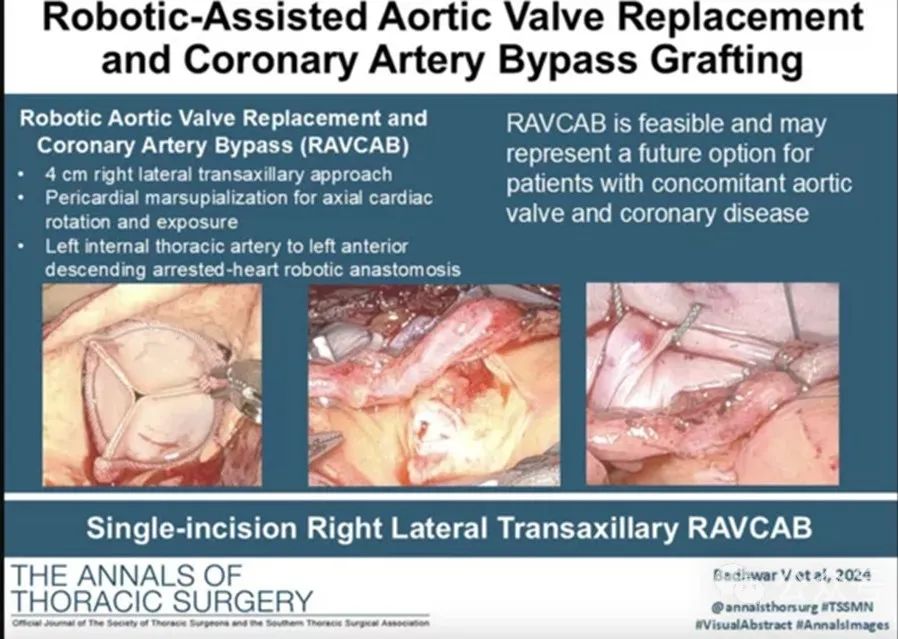
“机器人辅助体外循环非体外循环微创直接冠状动脉搭桥术和全内窥镜冠状动脉搭桥术 (TECAB) 已被确定为可能用于移植狭窄左前降支 (LAD) 冠状动脉的左胸入路。通过 3 cm 外侧经腋窝小开胸手术进行的机器人主动脉瓣置换术 (RAVR) 已被确定为治疗严重主动脉瓣疾病的一种方法。我们特此描述一个通过单右侧微创经腋窝入路进行的 RAVCAB 新病例。
Badhwar 等人对尸体进行了多次测试,以帮助为同类首创的手术做准备。该团队利用其以前的 RAVR 经验作为指导,开发了用于左胸内动脉 (LITA) 采集、LAD 暴露和 TECAB 的新技术,这些技术都可以通过患者胸部最右侧的一个切口进行。
Lawrence Wei 医学博士协助医学博士 Vinay Badhwar 进行机器人引导的心脏手术。
当一名有中风、脑部手术和持续体重减轻病史的 73 岁女性患者首次被转诊到 Badhwar 接受治疗时,她的症状在药物治疗六周后并未消退。Badhwar 的团队建议进行心内直视手术,但患者和她的家人询问了微创治疗方案的潜力。然后,护理团队将 RAVCAB 作为一个潜在的选择,明确表示她将是每个接受此类手术的第一位患者。如果出现任何问题,各方都同意可以将心内直视手术作为备用选项进行。
Badhwar 和他的团队于 10 月 31 日进行了机器人手术。在对这次经历的分析中,该小组写下了他们遇到的两个“要素”。首先,患者呈现“数量惊人的心外膜脂肪组织”,增加了新的复杂程度。其次,患者不能耐受没有瞬时氧饱和度下降和脑血氧饱和度下降的通气。
然而,手术仍然很成功,总阻断时间为 224 分钟,总体外循环时间为 352 分钟。射血分数从治疗前的 35% 提高到治疗后的 45%,患者“从术前失败状态中期待地恢复过来”。她最终以 50% 的射血分数出院。
随着经导管治疗主动脉瓣疾病的替代方案在低风险患者中不断发展,提供非胸骨切开手术选择的能力与平衡心脏团队的考虑变得越来越相关。最近,RAVR 与 TAVR 的倾向匹配比较显示,在中低风险患者中,RAVR 与卓越的短期和一年结果相关。尽管对伴随或分期 TAVR 和经皮冠状动脉介入治疗的理解不断发展,但外科主动脉瓣置换术和冠状动脉搭桥术的结局为中低风险患者提供了目前的金标准。随着经导管领域的发展,我们建议外科领域也应该效仿,为患者提供平衡的微创替代方案。如果 RAVCAB 的结果可以复制传统手术治疗的结果,这可能会为开放手术和经导管选择提供可行的替代方案。
Reference:
Vinay Badhwar, MD, Goya V. Raikar, MD, Ali Darehzereshki, MD, et al. Robotic-Assisted Aortic Valve Replacement and Coronary Artery Bypass Grafting. The Annals of Thoracic Surgery. Dec. 9, 2024.
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言













优秀
1
#机器人辅助# #心脏外科#
8